| Tunable Detection Targets | Checkerboard | SFRreg |
Accessing Detection Settings
The Target Detection Settings window is accessible from Checkerboard Setup window:
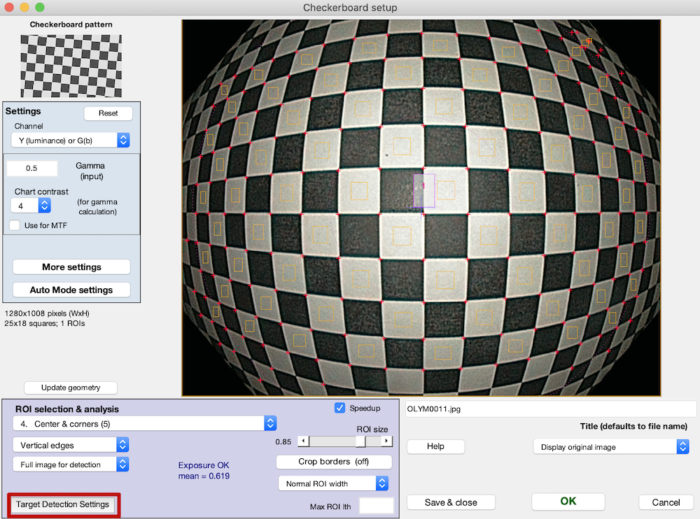
Checkerboard Setup window with Target Detection Settings window button highlighted.
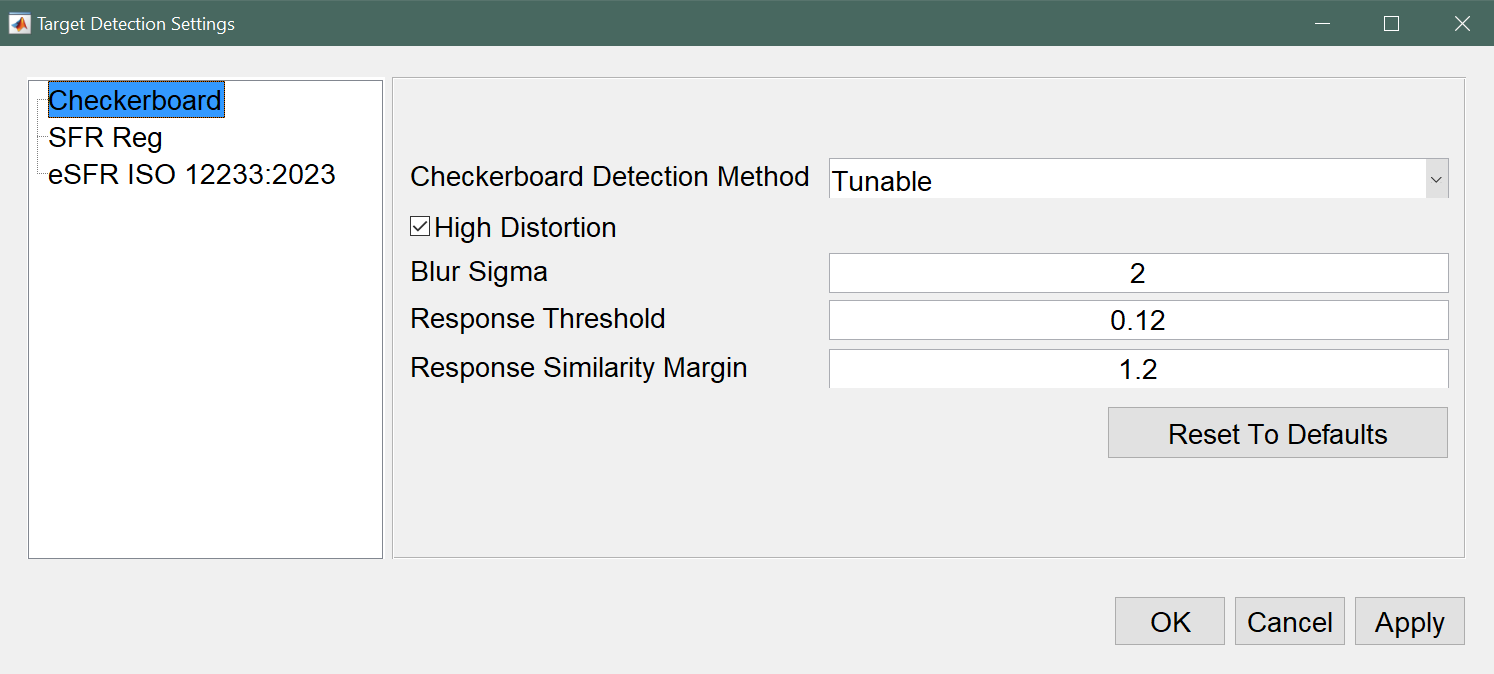
Target detection settings for Checkerboard in Imatest 24.1
Settings Fields
INI fields are found in the [checkerboard] section.
| Setting Name | Allowed Values | INI Field | Description |
|---|---|---|---|
| Checkerboard Detection Method | MATLAB, Tunable | detectionMethod | Determines which checkerboard detection algorithm is used. MATLAB uses the built-in MATLAB routine, which does not offer further tuning and only returns full rectangular subsets of detected points, meaning points are often not found because they are not in a full row within the image. Tunable is an Imatest proprietary routine which enables the use of the further tuning options. It is also capable of finding target points which are not parts of fully found rows/columns, which can greatly enhance coverage when the target fills the image or in highly distorted images. Default: MATLAB |
| High Distortion | 0, 1 | highDistortion | Enable for highly distorted images (e.g., fisheye distortion). Disable for images that do not contain high levels of distortion. Enabling this option can increase detection robustness for highly distorted checkerboard images. Enabling this option can increase the time it takes for detection to complete. Default: 0 |
| Blur Sigma | [2, inf] | blurSigma | Allowed level of blurriness of the image. Increasing this value may improve detection in instances where failure is due to blurriness in the image, but if this is set too large, points may not be detected at all. Default: 2 |
| Response Threshold | [0, 1] | responseThreshold | Minimum “corner response” required to detect a corner. Decreasing this value may improve detection in instances where failure is due to high blurriness or low contrast in the image. Default: 0.15. |
| Response Similarity Margin | [1, 10] | responseSimilarity | Threshold for acceptance of new points based on corner response relative to other found points. Increasing this value lets more image points pass as meaningful checkerboard corner points.
This may assist in instances where failure is due to non-uniform illumination or high vignetting. Increasing too high could introduce spurious points around the checkerboard, particularly if it does not fill the field of view and there is complicated scenery behind the target.
Default: 1.2 |
MATLAB vs Tunable Detection Coverage
The shortcomings of the MATLAB checkerboard detection’s inability to return points which are not part of a full row or column are evident from the following example, with detected points marked in red. The Imatest tunable detection method (with default settings) gets much greater coverage over the image.
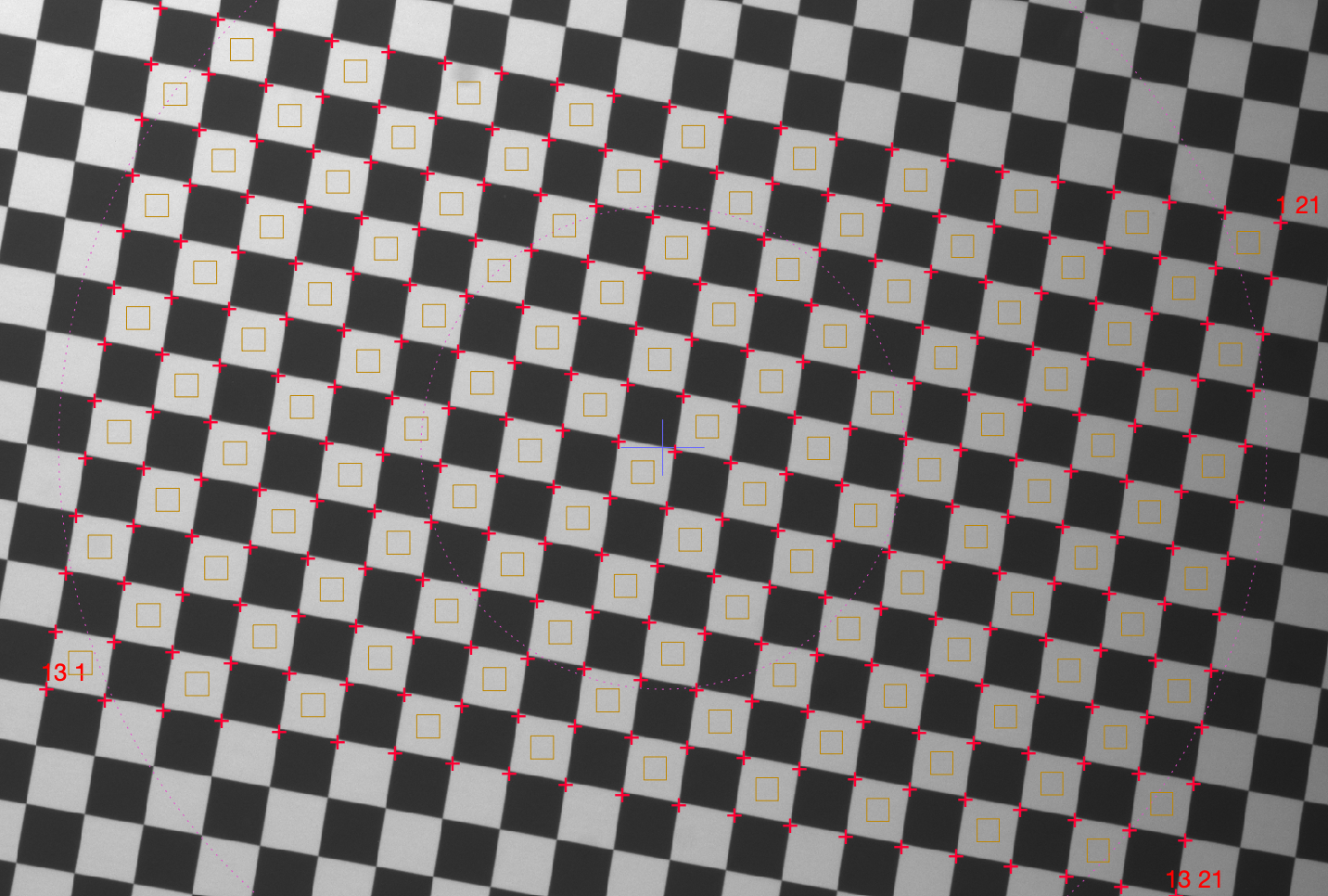 MATLAB checkerboard detection coverage. Click to enlarge. |
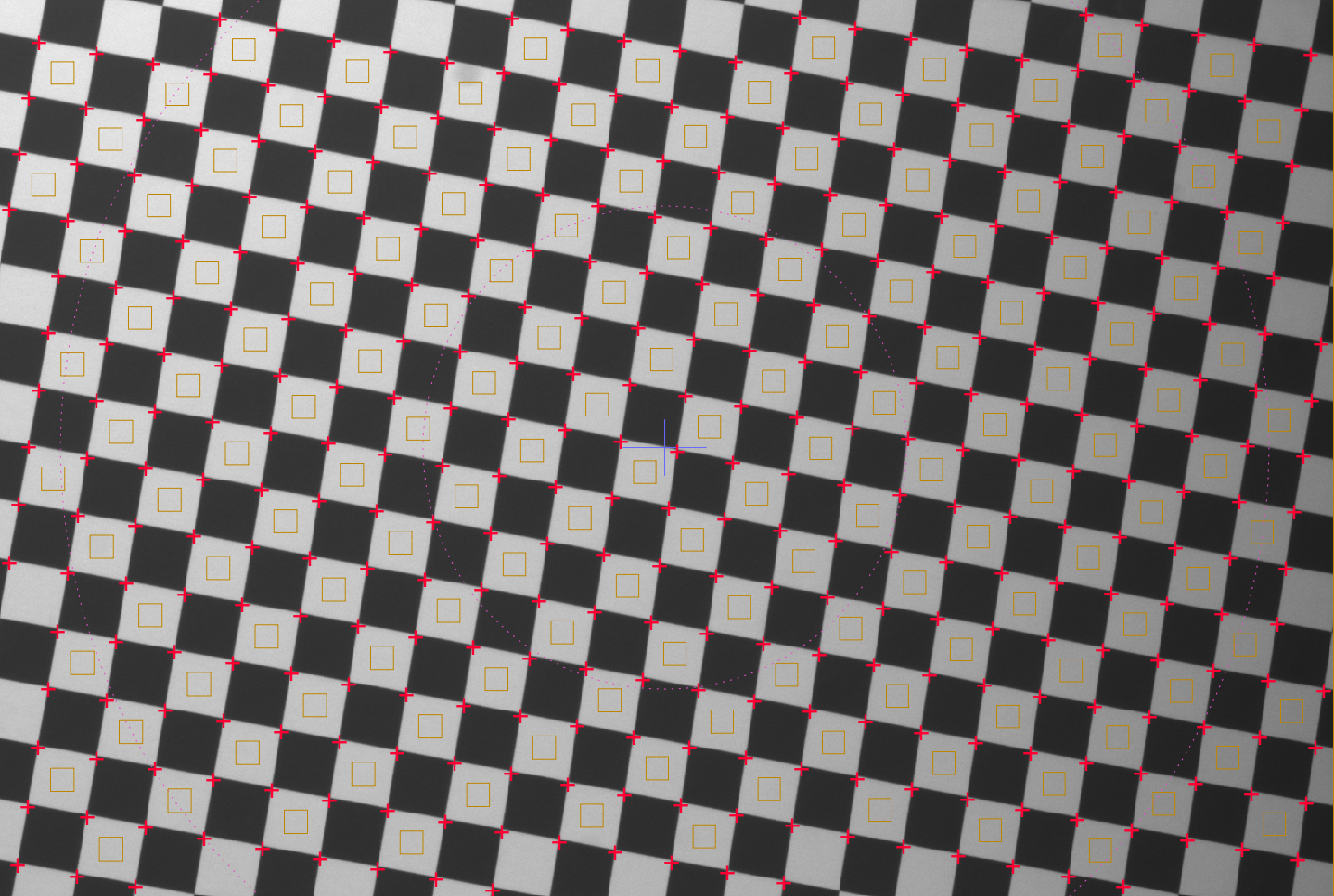 Imatest tunable checkerboard detection coverage. Click to enlarge. |
In the case of small shifts in camera or chart position, this increased coverage is also more stable because there will not be a transition point when a new full row or column is seen by the MATLAB routine.